Robot cuadrupedo
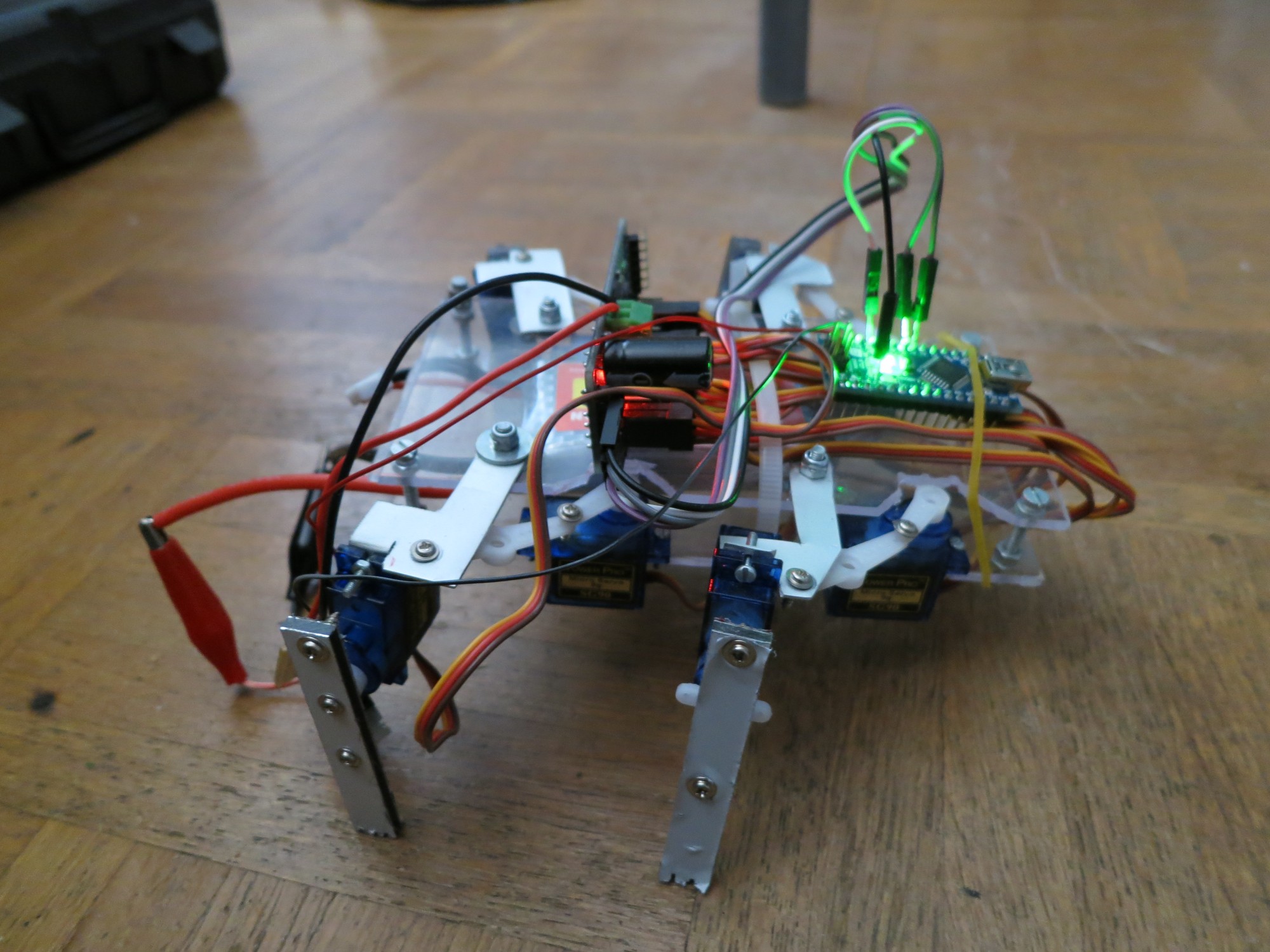
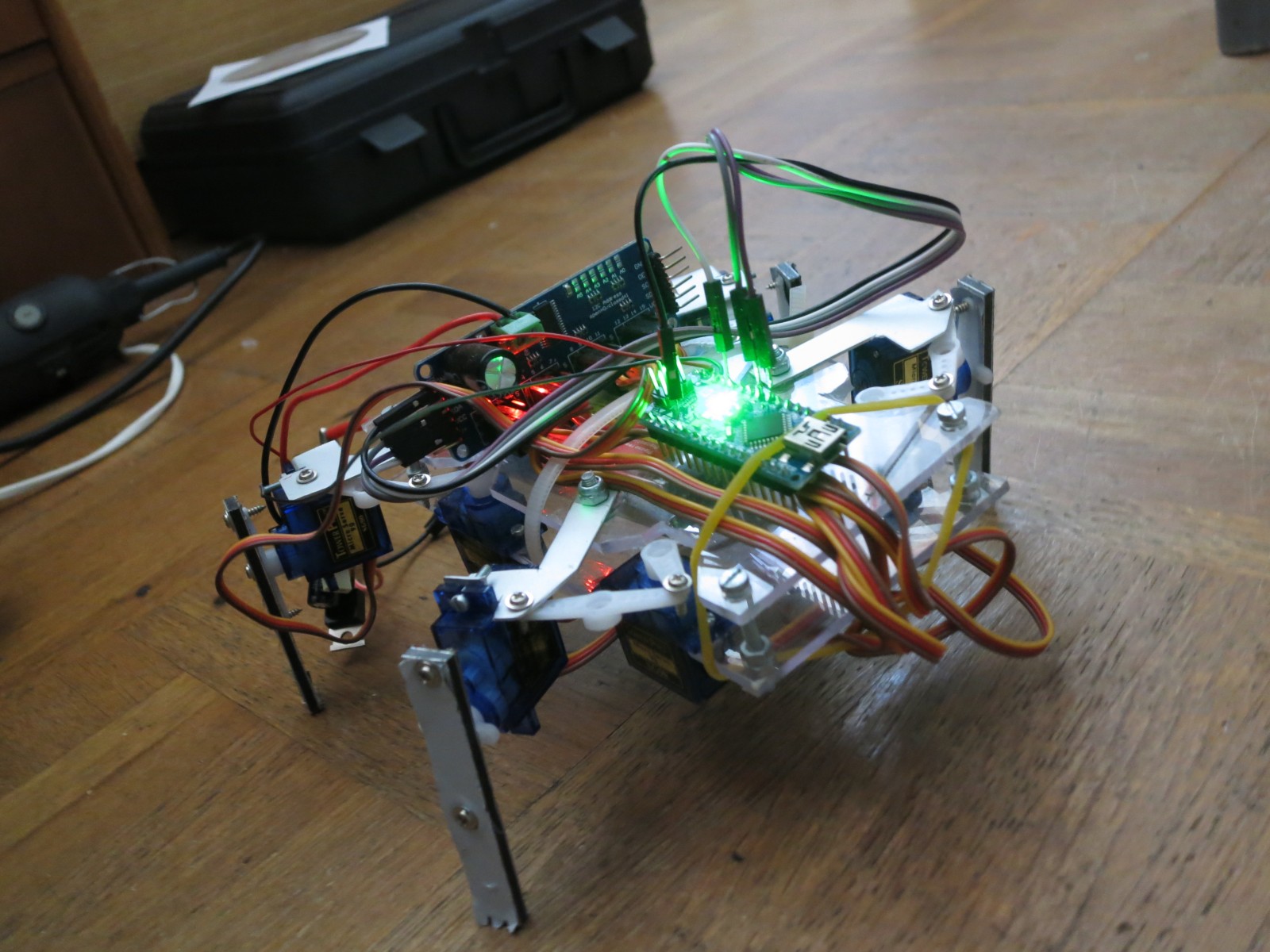
Robot cuadrúpedo. Poco hay que decir, lo controla un Arduino nano y esta construido con ocho micro reles.
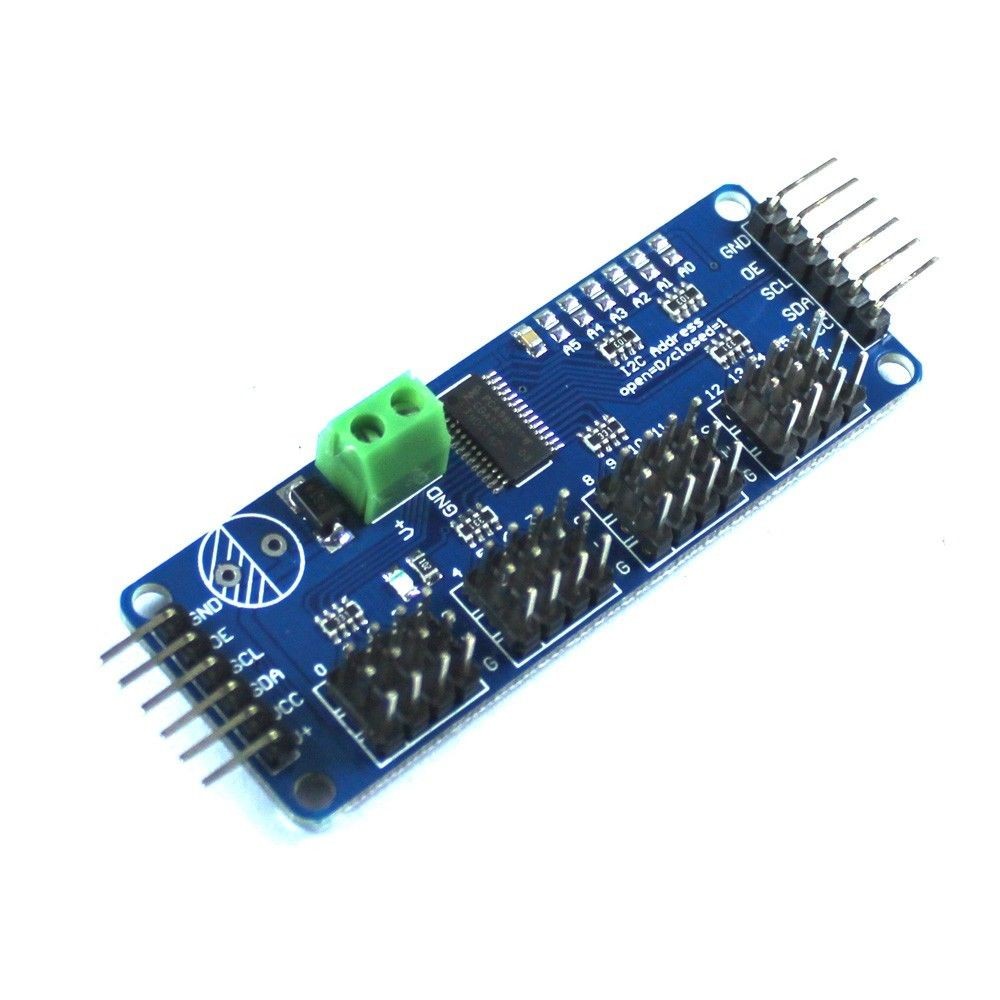
Como son muchos reles, he usado una controladora de 16 canales y control por I2C. Esto me permite con solo dos hilos manejar los 8 reles y aún me quedan otros ocho canales libres. Incluso pueden unirse varias controladoras en serie. La energia es de una bateria Lipo 2S y 1500mA.
El robot es bastante torpe, principalmente por deficiencias mecánicas. Pero es solo un divertimento y un reto de que podia hacerlo de cuatro patas.
Como son muchos reles, he usado una controladora de 16 canales y control por I2C. Esto me permite con solo dos hilos manejar los 8 reles y aún me quedan otros ocho canales libres. Incluso pueden unirse varias controladoras en serie. La energia es de una bateria Lipo 2S y 1500mA.
El robot es bastante torpe, principalmente por deficiencias mecánicas. Pero es solo un divertimento y un reto de que podia hacerlo de cuatro patas.