Un proyecto sencillo. Un robot para de trasportar algunas cosas. Parece una tonteria, pero si alguien tiene movilidad reducida puede ser una pequeña ayuda
Controlado con teléfono Android a través de Bluetooth. Comandos por botones en pantalla o por medio del acelerómetro del teléfono.
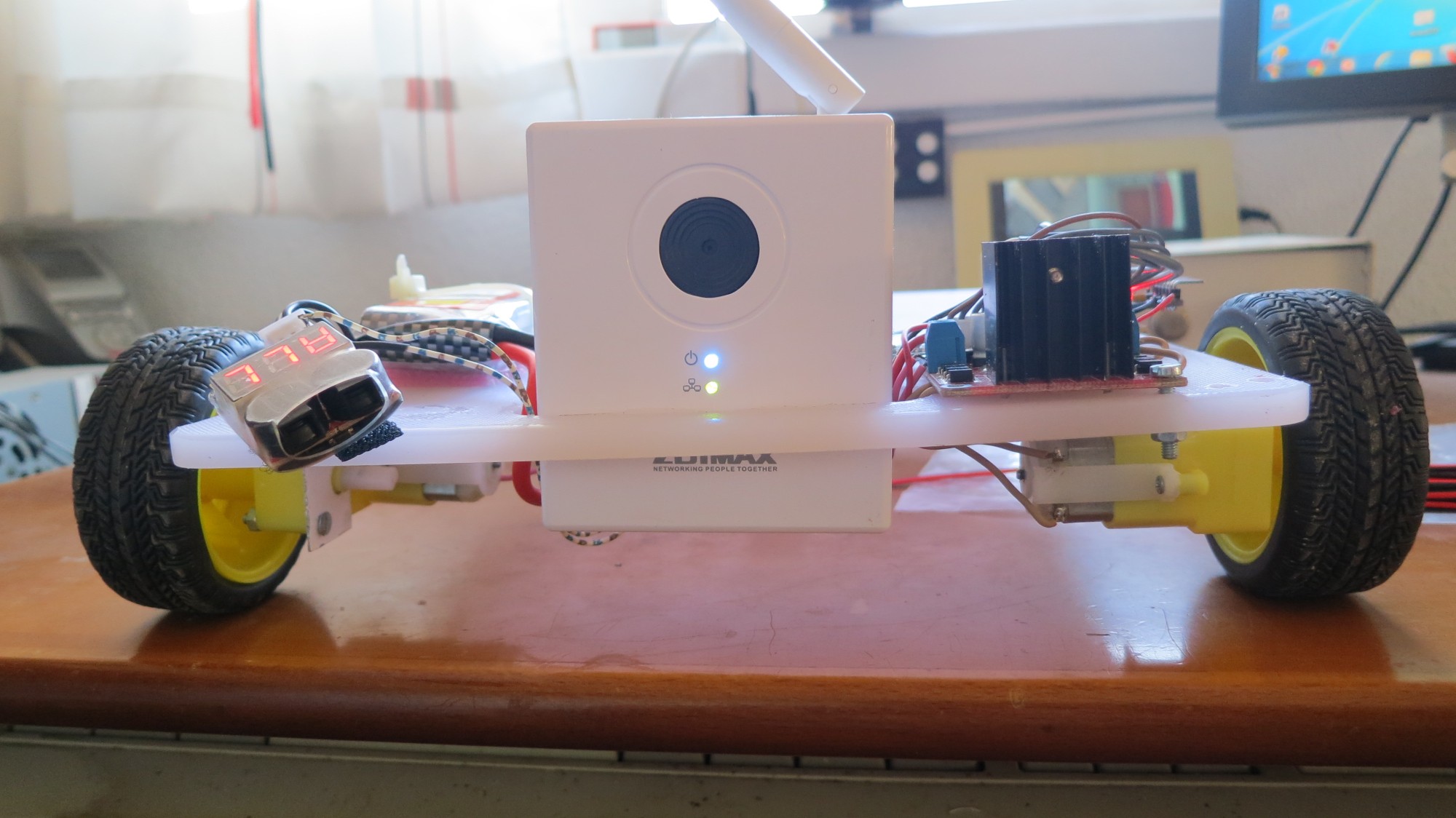
Lleva una cámara IP wifi que a través del modem de la vivienda, nos permite ver por donde anda el "bicho".
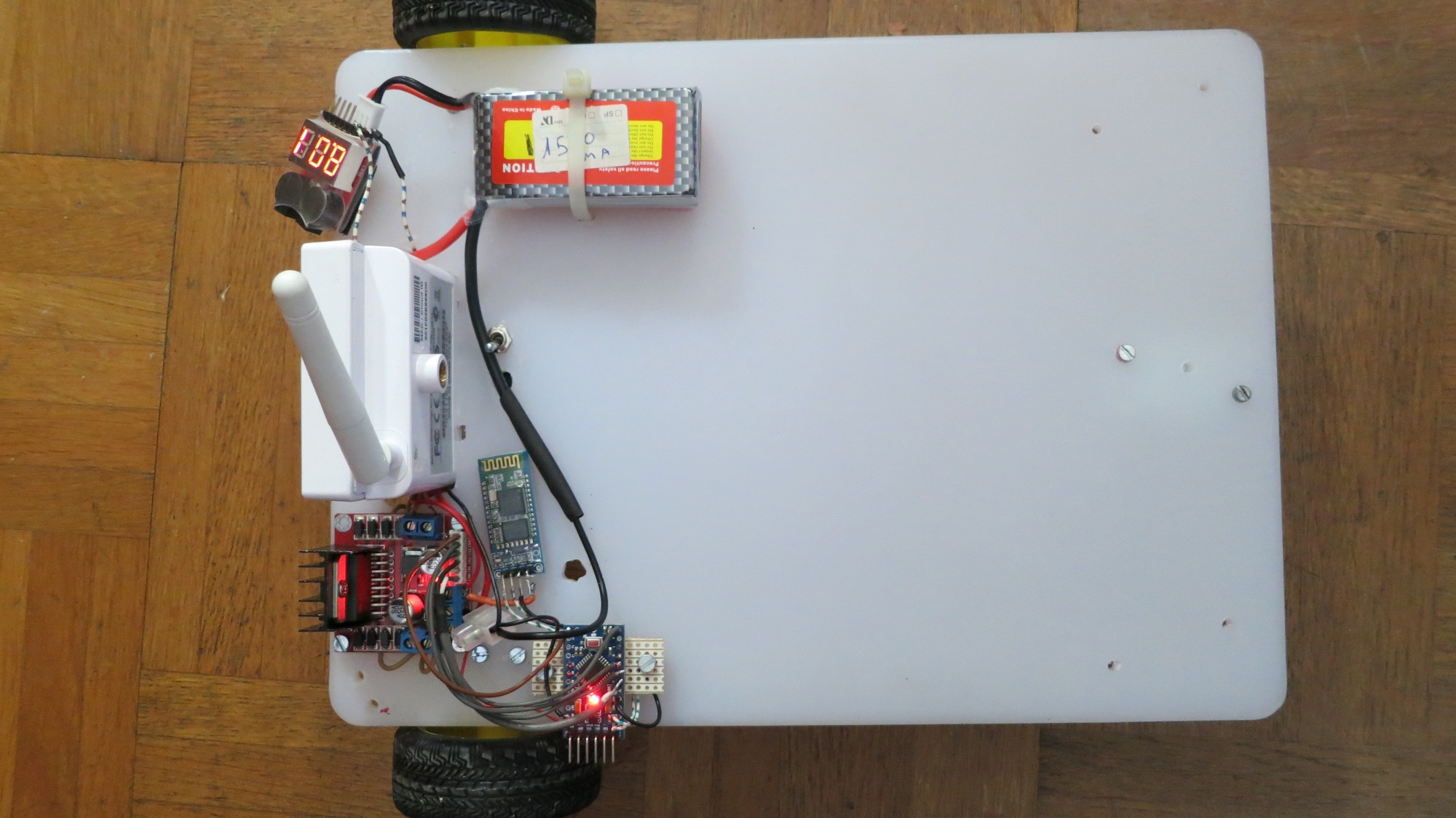
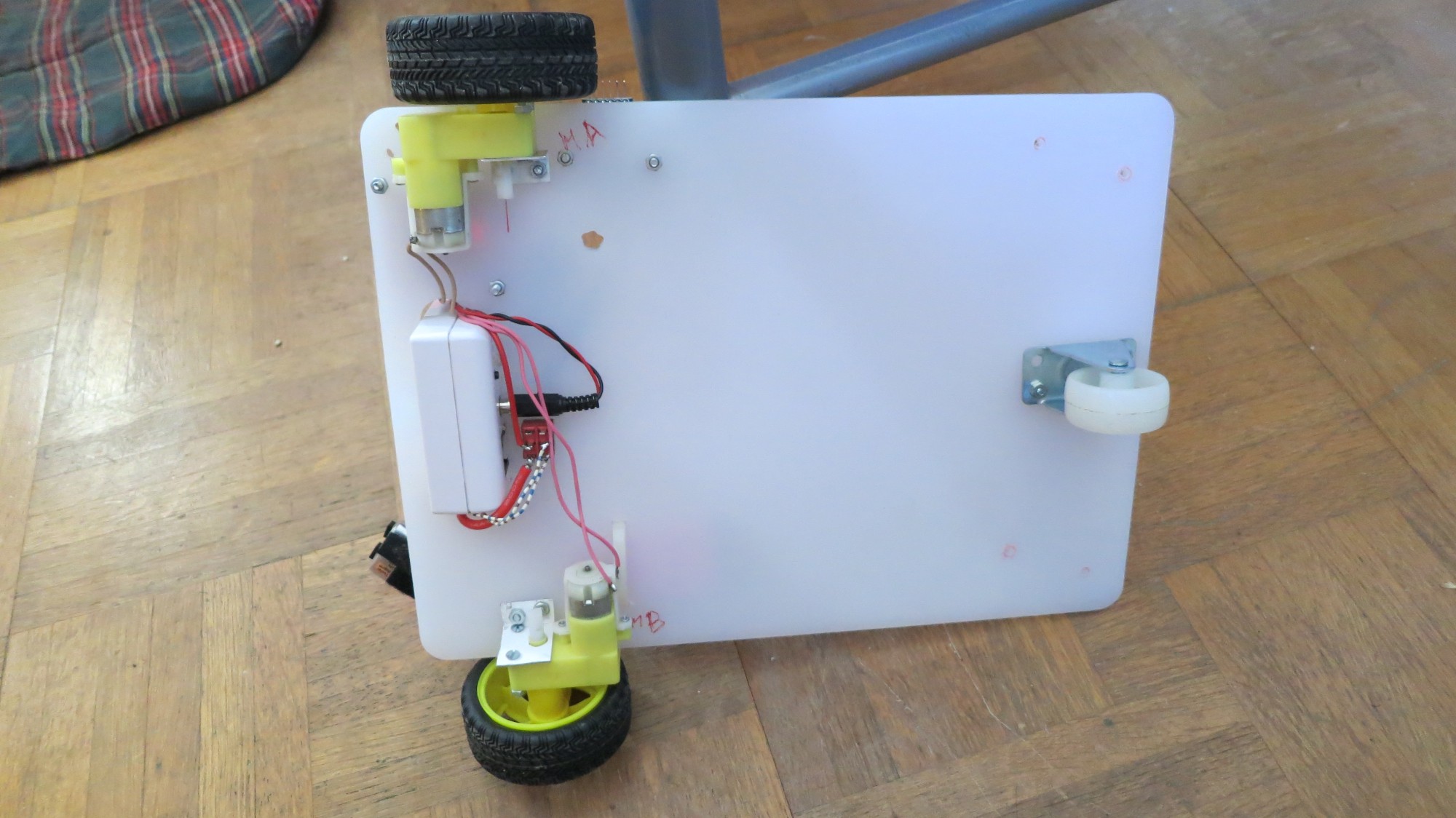
Todo puede verse en las fotografias.
-Dos motores de CC instalados en tabla de cocina.
-Control de motores con circuito basado en L298N.
-Arduino mini con módulo Bluetooth.
-Cámara IP Wifi Edimax (opcional)
-Bateria Lipo 2S de 1500mA.
Robot camarero
//RobotCamarero
//www.jopapa.me
//2015
int d1A=2; //IN1
int d2A=3; //IN2
int speedA=9; //ENA
int d1B=4; //IN3
int d2B=5; //IN4
int speedB=10; //ENB
int speed;
int f=0; //para aumentar fuerza en giros al ir cargado
void setup(){
Serial.begin(9600);
pinMode(d1A, OUTPUT); pinMode(d2A, OUTPUT); pinMode(speedA, OUTPUT);
pinMode(d1B, OUTPUT); pinMode(d2B, OUTPUT); pinMode(speedB, OUTPUT);
speed=0;
pinMode(6, OUTPUT); //activación del pin 6 como salida: para el pulso ultrasónico
pinMode(7, INPUT); //activación del pin 7 como entrada: tiempo del rebote
}
void loop(){
char dato= Serial.read();
// if (Serial.available()>0){input=Serial.read();}
if (dato == 'v') { //+ potencia (util en giros si el robot va cargado)
if (f<240){ f=f+10;} }
if (dato == 'b') { // - potencia
if (f>=10){f=f-10;} }
//-------------------------------------------------
if (dato == 'p') { //PARAR
digitalWrite(d1A,LOW);digitalWrite(d2A,LOW);
digitalWrite(d1B,LOW);digitalWrite(d2B,LOW);
}
//-----------------------------------
if (dato == '1') { //Adelante vel. baja
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 60); analogWrite(speedB, 60);
}
if (dato == '2') { //Adelante vel. media
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 160); analogWrite(speedB, 100);
}
if (dato == '3') { //Adelante vel. alta
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 240); analogWrite(speedB, 200);
}
//-----------------------------------
if (dato == 'r') { //Retrocede vel. baja
digitalWrite(d1A,LOW);digitalWrite(d2A,HIGH);
digitalWrite(d1B,LOW);digitalWrite(d2B,HIGH);
analogWrite(speedA, 60); analogWrite(speedB, 60);
}
//---------------------------------------------
if (dato == 'j') { //Derecha giro lento
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 90+(f/2)); analogWrite(speedB, 50);
}
if (dato == 'k') { //Derecha giro rapido
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 100+(f/2)); analogWrite(speedB, 40);
}
if (dato == 'l') { //Derecha giro muy rapido
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,LOW);digitalWrite(d2B,HIGH);
analogWrite(speedA, 70+f); analogWrite(speedB, 40);
}
//---------------------------------------------
if (dato == 'a') { //Izquierdo giro lento
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 50); analogWrite(speedB, 90+(f/2));
}
if (dato == 's') { //Izquierdo giro rapido
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 40); analogWrite(speedB, 100+(f/2));
}
if (dato == 'd') { //Izquierdo giro muy rapido
digitalWrite(d1A,LOW);digitalWrite(d2A,HIGH);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 40); analogWrite(speedB, 70+f);
}
}
//www.jopapa.me
//2015
int d1A=2; //IN1
int d2A=3; //IN2
int speedA=9; //ENA
int d1B=4; //IN3
int d2B=5; //IN4
int speedB=10; //ENB
int speed;
int f=0; //para aumentar fuerza en giros al ir cargado
void setup(){
Serial.begin(9600);
pinMode(d1A, OUTPUT); pinMode(d2A, OUTPUT); pinMode(speedA, OUTPUT);
pinMode(d1B, OUTPUT); pinMode(d2B, OUTPUT); pinMode(speedB, OUTPUT);
speed=0;
pinMode(6, OUTPUT); //activación del pin 6 como salida: para el pulso ultrasónico
pinMode(7, INPUT); //activación del pin 7 como entrada: tiempo del rebote
}
void loop(){
char dato= Serial.read();
// if (Serial.available()>0){input=Serial.read();}
if (dato == 'v') { //+ potencia (util en giros si el robot va cargado)
if (f<240){ f=f+10;} }
if (dato == 'b') { // - potencia
if (f>=10){f=f-10;} }
//-------------------------------------------------
if (dato == 'p') { //PARAR
digitalWrite(d1A,LOW);digitalWrite(d2A,LOW);
digitalWrite(d1B,LOW);digitalWrite(d2B,LOW);
}
//-----------------------------------
if (dato == '1') { //Adelante vel. baja
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 60); analogWrite(speedB, 60);
}
if (dato == '2') { //Adelante vel. media
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 160); analogWrite(speedB, 100);
}
if (dato == '3') { //Adelante vel. alta
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 240); analogWrite(speedB, 200);
}
//-----------------------------------
if (dato == 'r') { //Retrocede vel. baja
digitalWrite(d1A,LOW);digitalWrite(d2A,HIGH);
digitalWrite(d1B,LOW);digitalWrite(d2B,HIGH);
analogWrite(speedA, 60); analogWrite(speedB, 60);
}
//---------------------------------------------
if (dato == 'j') { //Derecha giro lento
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 90+(f/2)); analogWrite(speedB, 50);
}
if (dato == 'k') { //Derecha giro rapido
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 100+(f/2)); analogWrite(speedB, 40);
}
if (dato == 'l') { //Derecha giro muy rapido
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,LOW);digitalWrite(d2B,HIGH);
analogWrite(speedA, 70+f); analogWrite(speedB, 40);
}
//---------------------------------------------
if (dato == 'a') { //Izquierdo giro lento
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 50); analogWrite(speedB, 90+(f/2));
}
if (dato == 's') { //Izquierdo giro rapido
digitalWrite(d1A,HIGH);digitalWrite(d2A,LOW);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 40); analogWrite(speedB, 100+(f/2));
}
if (dato == 'd') { //Izquierdo giro muy rapido
digitalWrite(d1A,LOW);digitalWrite(d2A,HIGH);
digitalWrite(d1B,HIGH);digitalWrite(d2B,LOW);
analogWrite(speedA, 40); analogWrite(speedB, 70+f);
}
}