Transportar Genny Mobility
Tras descartar el uso de rampas por su dificultad de alineamiento y espacio necesario detrás del vehículo para su instalación, se opta por una grua en el maletero.
Dicha grúa tiene 6 grados de libertad. Subir-bajar cinta, sacar-meter brazo y extraer-retraer brazo. Dispone de un mando por cable.
Para meter o sacar la silla son necesarios varias pulsaciones en diferentes botones y durante tiempos precisos. Simultáneamente hay que ir guiando la silla para que no roce con el vehículo. En este caso un Ford Gran C-Max donde entra muy ajustada.
Para facilitar el proceso se piensa en robotizar la grúa. Es decir, un circuito tiene memorizados la pulsación de los botones y sus tiempos. Solo hay que estar pendiente del giro de la silla. Además el proceso se puede controlar por medio de conexión Bluetooth con un programa en un teléfono Android, aunque finalmente se opto por usar solo dos botones, uno saca la Genny y otro la mete.
El circuito es bastante simple:
-Un microprocesador en una placa Arduino nano.
-Seis optoacopladores.
-Un módulo Bluetooth.
La grúa (CaroLift 6900) viene con un mando que lleva 7 hilos. Uno es común y los otros 6 al unirlo a este hacen los 6 movimientos posibles.
El circuito es muy simple, 6 salidas del Arduino controlan 6 optoacopladores que unen los 6 hilos al común según las ordenes programadas en el microprocesador. Como el mando está conectado a la grúa con un conector aéreo, el circuito esta interpuesto entre la grua y el mando. Eso permite que el mando continúe siendo totalmente operativo por si nuestro sistema fallase y además nuestro circuito esta totalmente aislado del de la grúa.
La grúa tiene finales de carrera que pueden ser programados por el instalador en las funciónes de sacar y meter el brazo, pero no en la subida de la cinta que eleva la silla y si nos pasamos de subida, ocasionaría una desagradable avería.
Se soluciona poniendo un detector HALL (sensible al magnetismo) en la punta del brazo y un imán (de neodimio) pegado a la cinta. Cuando el imán llega al sensor Hall, el microprocesador detiene la cinta (pero no en el mando manual). Esto es así porque la cinta nunca esta en la misma posición exacta y no podemos determinar con precisión los segundos de subida, simplemente ponemos de mas y el sensor la detiene y el programa continua con la siguiente orden.
Dicha grúa tiene 6 grados de libertad. Subir-bajar cinta, sacar-meter brazo y extraer-retraer brazo. Dispone de un mando por cable.
Para meter o sacar la silla son necesarios varias pulsaciones en diferentes botones y durante tiempos precisos. Simultáneamente hay que ir guiando la silla para que no roce con el vehículo. En este caso un Ford Gran C-Max donde entra muy ajustada.
Para facilitar el proceso se piensa en robotizar la grúa. Es decir, un circuito tiene memorizados la pulsación de los botones y sus tiempos. Solo hay que estar pendiente del giro de la silla. Además el proceso se puede controlar por medio de conexión Bluetooth con un programa en un teléfono Android, aunque finalmente se opto por usar solo dos botones, uno saca la Genny y otro la mete.
El circuito es bastante simple:
-Un microprocesador en una placa Arduino nano.
-Seis optoacopladores.
-Un módulo Bluetooth.
La grúa (CaroLift 6900) viene con un mando que lleva 7 hilos. Uno es común y los otros 6 al unirlo a este hacen los 6 movimientos posibles.
El circuito es muy simple, 6 salidas del Arduino controlan 6 optoacopladores que unen los 6 hilos al común según las ordenes programadas en el microprocesador. Como el mando está conectado a la grúa con un conector aéreo, el circuito esta interpuesto entre la grua y el mando. Eso permite que el mando continúe siendo totalmente operativo por si nuestro sistema fallase y además nuestro circuito esta totalmente aislado del de la grúa.
La grúa tiene finales de carrera que pueden ser programados por el instalador en las funciónes de sacar y meter el brazo, pero no en la subida de la cinta que eleva la silla y si nos pasamos de subida, ocasionaría una desagradable avería.
Se soluciona poniendo un detector HALL (sensible al magnetismo) en la punta del brazo y un imán (de neodimio) pegado a la cinta. Cuando el imán llega al sensor Hall, el microprocesador detiene la cinta (pero no en el mando manual). Esto es así porque la cinta nunca esta en la misma posición exacta y no podemos determinar con precisión los segundos de subida, simplemente ponemos de mas y el sensor la detiene y el programa continua con la siguiente orden.
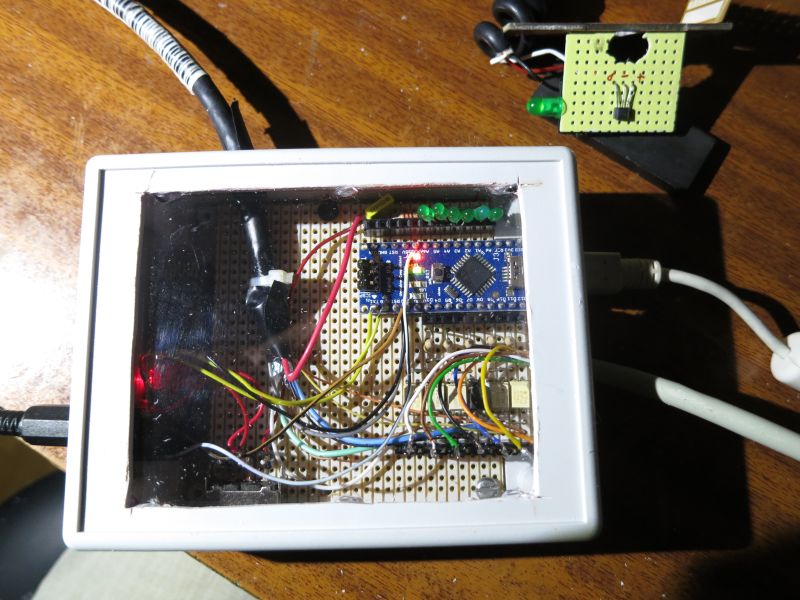
Arriba a la izquierda, parte del circuito. Falto conectar los hilos que vienen desde el mando
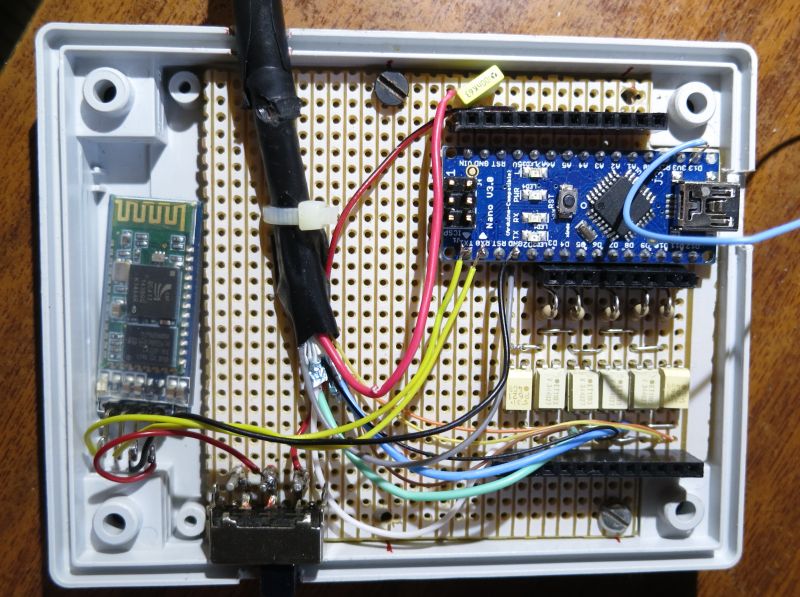
A la derecha ya en su caja. El cable superior va al conector de la grua, el izquierdo viene del sensor Hall, a la derecha el cable que va al mando manual y otro mas fino que es de quita y pon para poder reprogramar el microprocesador si se precisa para ajustar bien los tiempos.
A la derecha ya en su caja. El cable superior va al conector de la grua, el izquierdo viene del sensor Hall, a la derecha el cable que va al mando manual y otro mas fino que es de quita y pon para poder reprogramar el microprocesador si se precisa para ajustar bien los tiempos.

A la izquierda el sensor Hall y un imán rescatado de un disco duro
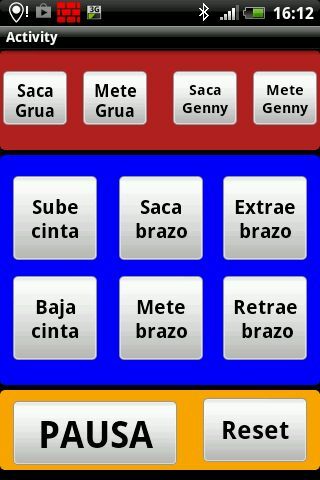
A la derecha vemos la pantalla del teléfono con el programa en marcha.
Al arrancar, el programa enciende el Bluetooth del teléfono y se conecta
automáticamente con el Bluetooth de nuestro circuito. En esto tarda menos
de 4 segundos.
Una vez nos aseguramos de que la silla está bien enganchada a la grúa, pulsamos SacaGenny o MeteGenny para que la grúa haga todos los movimientos programados.
Por supuesto, también podemos hacer los movimientos de forma manual con el teléfono y con el mando original de la grúa.
Hay un botón de reset para detener el proceso si vemos que algo va mal y seguir de forma manual.
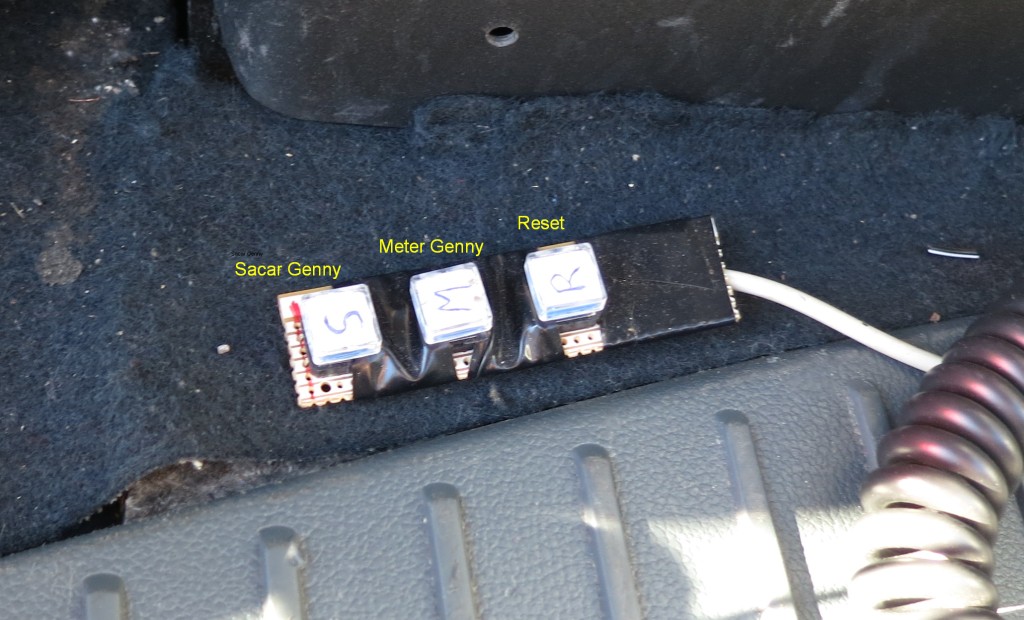
Como he dicho, posteriormente se deja el teléfono y se usan solo dos botones junto a la grúa. Con uno, la grua saca la Genny y vuelve a su posición de reposo en el coche y con el otro, saca el brazo, se engancha la Genny y la mete en el coche. Solo dos botones para todo. Permite estar pendiente unicamente de la máquina para que no tropieze con el vehiculo.
ximet2000@
hotmail.com
A la derecha vemos la pantalla del teléfono con el programa en marcha.
Al arrancar, el programa enciende el Bluetooth del teléfono y se conecta
automáticamente con el Bluetooth de nuestro circuito. En esto tarda menos
de 4 segundos.
Una vez nos aseguramos de que la silla está bien enganchada a la grúa, pulsamos SacaGenny o MeteGenny para que la grúa haga todos los movimientos programados.
Por supuesto, también podemos hacer los movimientos de forma manual con el teléfono y con el mando original de la grúa.
Hay un botón de reset para detener el proceso si vemos que algo va mal y seguir de forma manual.
Como he dicho, posteriormente se deja el teléfono y se usan solo dos botones junto a la grúa. Con uno, la grua saca la Genny y vuelve a su posición de reposo en el coche y con el otro, saca el brazo, se engancha la Genny y la mete en el coche. Solo dos botones para todo. Permite estar pendiente unicamente de la máquina para que no tropieze con el vehiculo.
ximet2000@
hotmail.com
